1、車輛的三種轉彎行駛特性
轉向特性一般可以分為不足轉向、中性轉向和過度轉向三種情況。
 不足轉向
不足轉向
①不足轉向表現為車輛在彎中的實際轉向角度比前輪的轉動角度小,也就是前輪出現瞭向外側的滑動,這種轉彎也俗稱“推頭”。
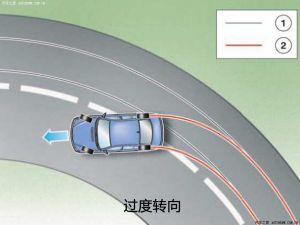 過度轉向
過度轉向
②轉向過度表現為車輛在彎中的實際轉向角度比前輪的轉動角度大,也就是後輪出現瞭向外側的滑動。
③中性轉向表現為車輛在彎中的實際轉向角度恰好是前輪的轉動角度,這種轉向特性往往可以達到最大的轉彎速度,但是這也降低瞭駕駛員對車輛在一定程度上接近物理極限的主觀感受。
對於前驅車來說,在出現不足轉向時,可以通過降低車速來解決。但是如果出現較嚴重的轉向過度則需要反打方向並配合加油來通過,這也是漂移的技巧,不過這對駕車人的要求很高。所以一般來說,普通民用車在轉向特性的調校上會偏向於輕微的不足轉向以保證行駛的穩定。
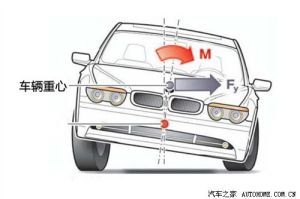
2、後輪轉向對整車轉向特性的影響
後輪轉向存在與前輪同向和反向兩種情況,而且這兩種情況也會表現出兩種完全不同的轉向特性。簡單來說就是同向增加不足轉向,反向增加過度轉向。車輛在低速行駛時,可以通過後輪與前輪的反向轉動來適當增加轉向過度。高速行駛的車輛遇到緊急變線的情況時,在沒有任何電子輔助系統的幫助下,很容易出現轉向過度的傾向,通過後輪產生一個很小但很重要的與前輪相同方向的轉向則可以彌補轉向過度的趨勢,這樣會讓汽車有更好的平衡性。
車輛在過彎時,車輪觸地面積以及車輪定位的變化會導致轉向特性的變化。應該說,後輪轉向技術可以彌補由於使用橡膠充氣輪胎所導致的車輛轉向機構的先天缺陷。這種後輪轉向更像是ESP系統的工作原理,即車輛高速運動時,通過制動某個或某幾個車輪,以保持車輛行駛姿態的穩定。
 2
2
後輪轉向目前主要通過兩種方式來實現,一種是通過機械結構來達到,另一種則是通過電機或液力來實現。通過機械結構來實現後輪轉向往往是被動的,一般是依靠車輛在轉彎時地面的側向摩擦力來使後輪產生小幅度的轉向,這裡我們來看看標志雪鐵龍的後輪隨動轉向技術。
3、後輪隨動轉向
 3
3
這套結構其實很簡單,它並非在後輪佈置瞭一套完整的轉向機構,而僅僅是在後輪與懸掛,懸掛與車身之間佈置瞭一些橡膠軟墊,通過橡膠使懸掛和車身實現柔性連接,由於橡膠存在一定彈性,所以在汽車轉彎時,後懸掛連接點的橡膠軟墊在橫向力的作用下能發生一定程度的彈性形變,從而帶動車輪做一定角度的變化。這個轉向角度取決於橡膠軟墊的軟硬度。橡膠墊越軟,後輪可變轉向角度越大,但懸掛剛度降低穩定性差,橡膠軟墊越硬,後輪轉向角度越小,但懸掛剛度大,穩定性高。因此在設計時需要權衡其優缺點,根據汽車的實際用途的側重點做調校,一般來說,後輪的轉向角度都在3度以下。
雖然這是一個被動的轉向機構,但是其結構相對簡單,技術含量低、成本低。所以它可以應用在一些經濟性轎車上,比如富康車型等。
4、後輪主動式轉向
對於大型豪華車來說,不斷加長的軸距為車內帶來瞭良好舒適的乘坐空間,但是這也對車輛的操控性帶來瞭一定的負面影響。無論是低速時的轉彎半徑,還是高速行駛時的穩定性都會打折扣。通過加入後輪轉向系統則可以彌補軸距增加後對車輛行駛特性造成的影響,同時讓一款豪華車同樣具有很好的駕駛樂趣。這套主動式後輪轉向系統的原理也並不復雜,就是一套絲杠螺母機構,電機驅動螺母帶動絲杠產生軸向移動。這種軸向移動會帶動後輪產生小幅度的轉向,當車速在60km/h以上時,後輪與前輪同向偏轉,提升高速過彎的穩定性。在60km/h以下時則反向偏轉,增加車輛的靈活性。
這套主動式後輪轉向系統的科技含量主要還是集中在控制系統上,工作時,它需要接受車輛各種的動態行駛信號,然後綜合判斷輸出一個相適的轉向角度,任何計算的失誤都有可能導致車輛失去控制,特別是在車輛高速行駛時。